This page describes the procedures for setting up a Windows machine to compile dRonin firmware and GCS software. (More details on this are at Tracking Development with Git)
Build environment prerequisites
Supported Windows Versions
GCS requires Windows 7 or newer. See the Qt supported platforms list for further details.
Download required programs
Git 2.6.4 or later - The latest release should be fine.
Python 3 - The latest Python 3.x.x Anaconda distribution is recommended.
Qt 5.9.2 for Windows - Please do not install a newer release, as it will not work. Qt provides much of the GUI framework behind GCS, as well as some unix-like toolchain components.
Microsoft Visual Studio 2015 Community Edition - Do not install an older or newer release, as it will not work. MSVC is used to compile GCS on Windows.
Install required programs
Default install paths
The bash_profile provided by dRonin is built to use default install paths. Please keep default paths while installing tools unless you are prepared to edit the bash profile by hand. Read the following steps carefully to avoid problems.
- Install git. Default options are okay. You will use this to clone the dRonin repository to your machine. It also provides a bash shell and other Unix-like tools.
- Install Python 3.x.x Anaconda distribution. Default options are okay. Python is used at various stages in the build process for both GCS and firmware.
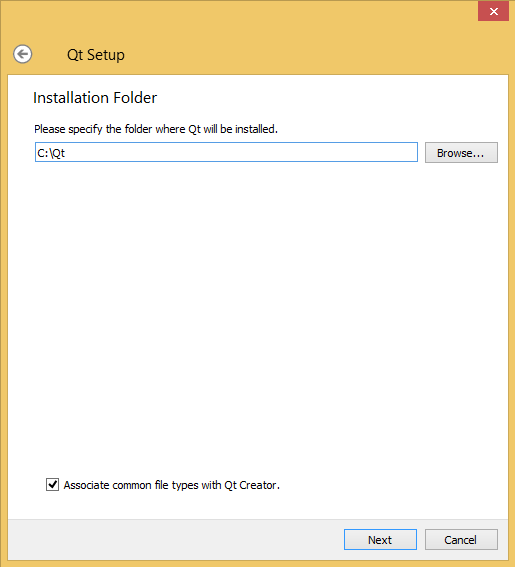
- Install Qt SDK.
- Skip account login etc.
- Use default installation folder.
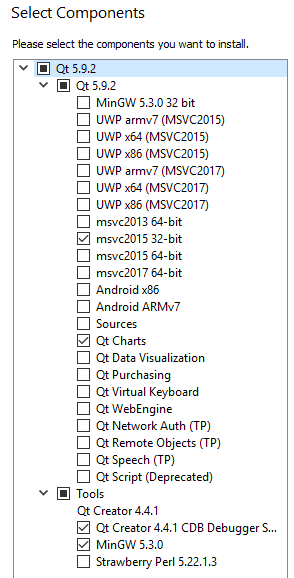
- Deselect everything that is selected by default (optional).
- Expand and select Qt / Qt 5.9.2 / msvc2015 32-bit.
- Expand and select Qt / Qt 5.9.2 / Qt Charts
- Expand and select Tools / MinGW 5.3.0
-
Accept license and shortcuts.
- Install Visual Studio.
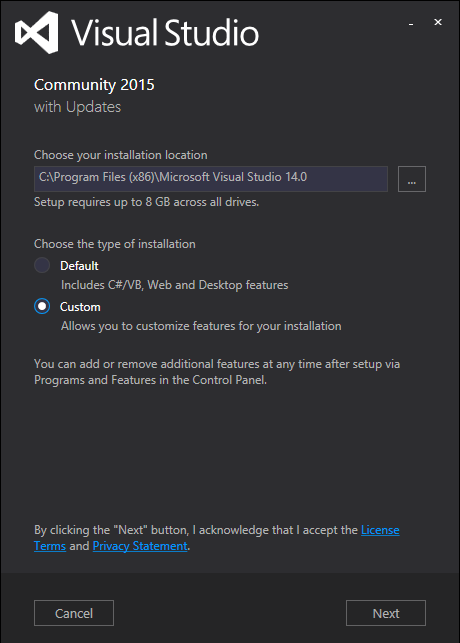
- Leave default install location, choose “Custom” installation type.
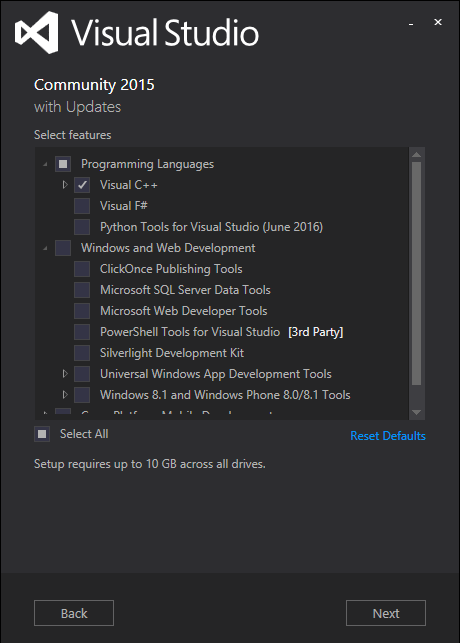
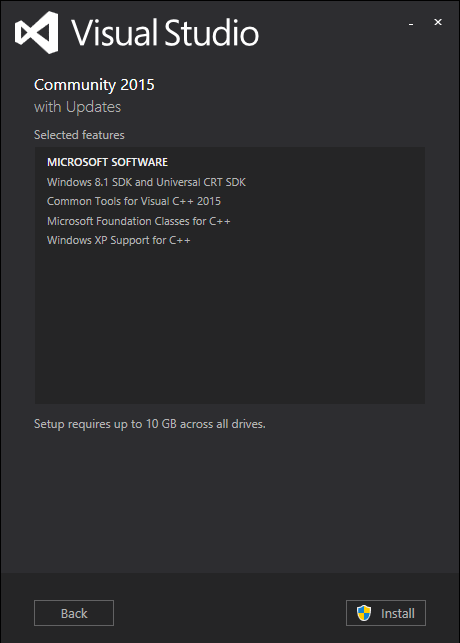
- Unselect default features (optional), expand “Programming Languages” and select “Visual C++”.
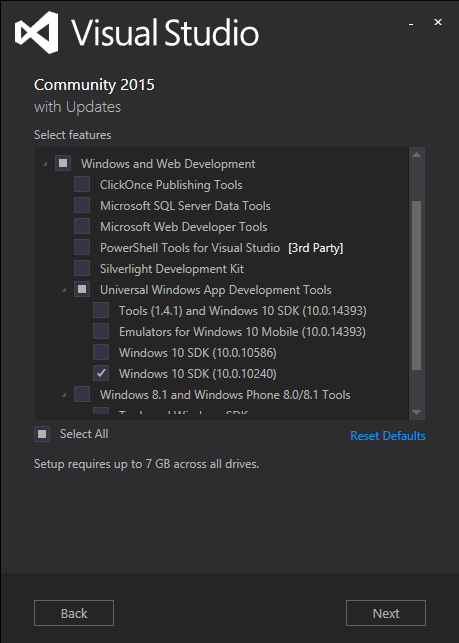
- Expand “Windows and Web Development”, then “Universal Windows App Development Tools”. Select “Windows 10 SDK (10.0.10240)” (Make sure to get this exact version!)).”
-
Install/accept UAC prompt.
-
Finally, copy the
python.exebinary in the Anaconda distribution topython3.exe.
Fetching source code and building
Cloning the repository
Start a shell using the “Git bash” program shortcut.
Next, clone the dRonin repository. If you have your own fork, specify its URL on the git command line instead of the default URL below:
git clone git://github.com/d-ronin/dRonin.git
cd dRonin
Type these command to install a bash_profile suitable for developing the project:
cp make/winx86/bash_profile ~/.bash_profile
chmod 755 ~/.bash_profile
You may have to edit bash_profile if you have changed any installation paths from the default. Then exit from the terminal using the command below. Once the terminal has closed, start a new “Git bash” instance.
exit
Automatic download and install of prerequisites
The dRonin build environment is capable of installing the rest of the tools that it needs.
Next change to the dRonin source directory, install the ARM SDK tools, openssl development libraries, and the zip compression tools used in packaging with the following commands.
cd dronin
make arm_sdk_install
make openssl_install
make zip_install
Next, it’s necessary to configure qbs (XXX I’m not sure this is necessary anymore):
qbs setup-toolchains --detect
GCS uses Google Breakpad for crash-reporting. Rather than compiling this every time you build GCS, it is built once during toolchain setup. Run make breakpad_install.
Building the software
You should be ready to go. Type make all to compile the entire project. Type make to see a list of possible make arguments.
Running GCS
You can run GCS from the command line after a successful build by typing: ./build/ground/gcs/bin/drgcs